Dérivation
[>] Vecteurs tangents à une partie
Soient un -espace vectoriel de dimension finie et dérivable en .
On suppose
Montrer que est linéaire
Solution
Pour , on obtient et donc .
Pour ,
Par récurrence, on acquiert
Par développement limité en , on peut écrire
On en déduit
À la limite quand tend vers l’infini,
Ainsi, est linéaire.
Pour , on pose
ce qui détermine une fonction dérivable .
- (a)
Calculer .
- (b)
A-t-on ?
Solution
- (a)
On remarque . On en déduit
- (b)
On obtient
et
La formule n’est pas vérifiée.
Pour et réel, on pose:
- (a)
Montrer que est une fonction dérivable et exprimer en fonction de pour et .
- (b)
En déduire l’expression de pour tous et .
Solution
- (a)
Notons la matrice dont est le déterminant. Par la formule définissant le déterminant,
On en déduit que la fonction est dérivable mais cette formule n’est pas particulièrement commode11 1 Cependant, on peut y parvenir après un effort de lucidité! pour calculer .
Notons les colonnes de la matrice . On sait
Les coefficients de étant des fonctions dérivables, on peut affirmer que chaque fonction est dérivable. Par multilinéarité du déterminant d’une famille de colonnes, on retrouve que l’application est dérivable22 2 Par la même argumentation, on montre de classe car les fonctions colonnes le sont. avec, au surplus, la formule de dérivation
On remarque que, pour tout , . Le déterminant d’une famille comportant deux vecteurs identiques étant nuls, on peut simplifier l’égalité précédente et écrire
En développant par rapport à la dernière colonne ce dernier déterminant, on obtient
- (b)
Sachant et , on montre par récurrence
La propriété est immédiatement vraie pour .
Supposons celle-ci acquise au rang avec .
Par hypothèse de récurrence,
La récurrence est établie
Calculer le déterminant
où réels.
Solution
En retirant la première colonne aux autres, on obtient un déterminant où ne figurent des que sur la première colonne. En développant selon cette première colonne, on obtient une expression affine de la variable .
Il reste à déterminer les réels exprimant cette fonction affine.
D’une part
et d’autre part
La dérivée d’un déterminant est la somme des déterminants obtenus lorsque l’on ne dérive qu’une colonne
où la colonne formée de 1 est à la position . Chaque déterminant se calcule en développant selon la ligne ne contenant que le coefficient 1 et l’on obtient
Soit une fonction dérivable.
Montrer qu’il existe tel que soit colinéaire à .
Soit une fonction de classe définie sur et à valeurs dans l’espace muni de sa structure euclidienne usuelle.
On suppose la fonction constante. Montrer que pour tout réel , les vecteurs et sont orthogonaux.
Soit une fonction dérivable ne s’annulant pas et telle que les vecteurs et sont colinéaires pour tout .
Montrer que la fonction prend toutes ses valeurs dans une même droite vectorielle.
(Loi des aires)
Soit une fonction de classe ne s’annulant pas et telle que les vecteurs et sont colinéaires pour tout .
Montrer que la fonction prend toutes ses valeurs dans un même plan vectoriel et que le triangle défini par les vecteurs et est d’aire constante.
Soient trois fonctions de classe de vers (avec ). On suppose
Montrer qu’il existe vérifiant
Solution
On introduit la fonction définie par
Cette fonction est continue sur , dérivable sur avec
De plus, et donc, par le théorème de Rolle, il existe tel que . Au surplus, et une nouvelle application du théorème de Rolle – à la fonction cette fois – donne l’existence de telle
Soit une application de classe vérifiant, pour tout réel ,
Montrer que la matrice n’est inversible pour aucune valeur de .
Soient un -espace vectoriel de dimension finie et .
Montrer que admet un prolongement de classe à si, et seulement si, admet une limite en .
Solution
Un tel résultat est déjà connu pour les fonctions à valeurs réelles par application du théorème des accroissements finis. En raisonnant via parties réelles et imaginaires on peut étendre ce résultat au cas d’une fonction complexe. En raisonnant via les fonctions coordonnées dans une base de , on prolonge ce résultat aux fonctions à valeurs dans .
Pour nilpotente, on pose
On étudie la fonction donnée par pour .
- (a)
Établir
- (b)
Montrer que est dérivable sur avec
- (c)
Montrer que est constante.
- (d)
En déduire .
Solution
- (a)
Puisque est nilpotente de taille , on sait . Cela assure que est correctement définie pour tout .
et l’on peut introduire
Les termes de la somme définissant commutent entre eux et donc
- (b)
Pour , on sait que est de classe sur avec
Par produit, on en déduit que la fonction est de classe sur . Aussi, par composition,
et, par dérivation d’un produit (et commutativité des facteurs),
On multiplie les deux membres par pour observer un télescopage en second membre
- (c)
On peut à nouveau dériver
ce qui se simplifie en
Puisque la matrice est nilpotente, elle est semblable à une matrice triangulaire supérieure stricte. Par cette similitude, on obtient et donc est une matrice inversible. On en déduit
La fonction est donc constante.
- (d)
On a et puis on obtient
En particulier,
Pour nilpotente, on pose
Établir que pour tout .
Solution
Puisque est nilpotente de taille , on sait . Cela assure que est correctement définie pour tout .
et l’on peut introduire
Les termes de la somme définissant commutent entre eux et donc
Pour , on sait que est de classe sur avec
Par produit, on en déduit que la fonction est de classe sur . Aussi, par composition,
et, par dérivation d’un produit (et commutativité des facteurs),
On multiplie les deux membres par pour observer un télescopage en second membre
On peut à nouveau dériver
ce qui se simplifie en
Puisque la matrice est nilpotente, elle est semblable à une matrice triangulaire supérieure stricte. Par cette similitude, on obtient et donc est une matrice inversible. On en déduit
La fonction est donc constante égale à puis on obtient
Soit dérivable à droite en 0 et vérifiant .
Déterminer la limite quand de
Solution
Par la dérivabilité à droite de en , on peut écrire
Puisque , on obtient
En exploitant
et
on obtient
Or donc
puis
(Inégalité des accroissements finis)
Soient un espace normé par , deux réels et une fonction dérivable. On suppose qu’il existe tel que
On souhaite établir11 1 On retrouve l’inégalité des accroissements finis déjà affirmée dans le cours mais obtenue ici avec l’hypothèse dérivable au lieu de classe .
- (a)
Soit . Montrer l’existence d’un plus grand élément tel que
- (b)
Montrer que et conclure.
Solution
- (a)
Méthode: On introduit la borne supérieure de l’ensemble des nombres convenables et l’on montre que celle-ci appartient aussi à cet ensemble.
Notons l’ensemble des vérifiant
Cet ensemble est une partie de , celle-ci est non vide car lui appartient et est majorée par . La partie admet donc une borne supérieure que l’on note encore . Par réalisation séquentielle d’une borne supérieure, il existe une suite d’éléments de qui tend vers . Les éléments appartiennent au segment et donc la limite aussi. En particulier, la fonction est définie en .
De plus, pour tout ,
Compte tenu de la continuité de , cela donne à la limite
Ainsi, est élément de , c’est le plus grand élément de vérifiant l’inégalité.
- (b)
Par l’absurde, supposons .
Méthode: Puisque , on montre que pour au voisinage de , on a l’inégalité .
Sachant
il existe tel que
Puisque est strictement inférieur à , on peut introduire tel que et alors
puis, par l’inégalité triangulaire,
Cela contredit la définition de , c’est absurde.
On en déduit que et donc
Enfin, cela valant pour tout , aussi petit soit-il, on a encore
Vecteurs tangents à une partie
[<] Dérivation[>] Formules de Taylor
Soit une partie non vide d’un espace normé . On suppose que est intérieur à . Déterminer l’ensemble des vecteurs tangents à en .
Solution
Puisque est intérieur à , il existe tel que .
Soit . Considèrons définie par . Pour proche de , donc . Au surplus, et et donc est tangent à en . L’ensemble vaut donc .
Soit la boule unité euclidienne fermée.
Déterminer les vecteurs tangents à en élément de la sphère unité.
Solution
Soit un vecteur tangent à la boule en . Il existe inscrit dans tel que et .
Puisque est inscrit dans , pour tout . La fonction est donc maximale en . On en déduit . Cela donne puis .
Inversement, soit un vecteur unitaire vérifiant . On considère définie par
On vérifie , et . On en déduit . Par colinéarité, tout vecteur orthogonal à est élément de .
Finalement, .
Déterminer l’ensemble tangent à en .
Solution
Commençons par remarquer que est élément de .
Soit un vecteur tangent à en . Il existe fonction définie au voisinage de et prenant ses valeurs dans vérifiant
Puisque , on obtient en dérivant
en notant les colonnes de . Puisque , il vient
en notant les colonnes de . Par développement selon la -ème ligne, on obtient
et, finalement, on parvient à la condition
Ainsi,
Inversement, soit . Considérons
pour réel au voisinage de . L’application est évidemment à valeurs dans . Aussi, à l’aide du calcul précédent,
de sorte que l’on obtient le développement limité
On a donc que et . Ainsi, est un vecteur tangent à en .
On conclut
- (a)
Déterminer l’ensemble tangent à en .
- (b)
Plus généralement, déterminer l’ensemble tangent à en .
Solution
- (a)
Commençons par remarquer que est élément de .
Soit un vecteur tangent à en . Il existe fonction définie au voisinage de et prenant ses valeurs dans vérifiant
Puisque , on obtient en dérivant
et donc
Ainsi,
Inversement, soit . Considérons pour . On remarque
L’application est donc à valeurs dans . Au surplus, et de sorte que . Ainsi, est un vecteur tangent à en .
On conclut
- (b)
Soit un vecteur tangent à en . Un calcul analogue au précédent conduit à la condition
soit
Par conséquent,
Réciproquement, on vérifie que définit une application dérivable à valeurs dans prenant la valeur en et de vecteur dérivé en .
On conclut
Formules de Taylor
[<] Vecteurs tangents à une partie[>] Arcs paramétrés
Soit de classe telle que
Montrer en écrivant deux formules de Taylor que .
Solution
Par l’inégalité de Taylor Lagrange:
et
On en déduit
donc
puis .
Soit .
- (a)
Montrer que, pour tout ,
- (b)
En déduire, pour de classe , la limite quand de
Solution
- (a)
Procédons par récurrence sur .
Pour ,
Supposons la propriété établie au rang .
Soit .
Si alors
Si alors
après développement du .
Si alors
La récurrence est établie.
- (b)
Par la formule de Taylor-Young,
donc
Soit une fonction de classe telle que et sont bornées. On pose
- (a)
Soit . Établir que pour tout
- (b)
En déduire que est bornée et
- (c)
En améliorant l’étude qui précède, montrer
Arcs paramétrés
Étudier la courbe paramétrée définie par
Solution
L’application est définie et de classe sur .
Réduction du domaine d’étude:
.
est le symétrique de par rapport à l’axe .
est le symétrique de par rapport au point .
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par les symétries de centre et d’axe .
Tableau des variations simultanées


Il y a deux points doubles. Pour des raisons de symétrie, ceux-ci correspondent à une abscisse nulle. On obtient un point double pour et de coordonnées . Par symétrie, l’autre point double est de coordonnées .
(Une ellipse)
Soient et deux réels strictement positifs avec
- (a)
Montrer que le système
définit pour parcourant un paramétrage de la courbe d’équation cartésienne
- (b)
Exploiter ce paramétrage pour donner l’allure de cette courbe.
On pose tel que et l’on introduit les deux points et de l’axe des abscisses situés à la distance de l’origine.
- (c)
Vérifier que la courbe étudiée est exactement celle constituée des points satisfaisant
(Astroïde)
- (a)
Étudier la courbe paramétrée définie par
- (b)
On note et les points d’intersection des axes et avec la tangente au point de paramètre de la courbe précédente. Calculer la distance .
Solution
- (a)
L’application est définie et de classe sur .
sont confondus.
est le symétrique de par rapport à l’axe
est le symétrique de par rapport à l’axe
est le symétrique de par rapport à la droit .
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par les symétries d’axe , puis .
Tableau des variations simultanées
Étude en . Le paramètre n’est pas régulier. Cependant
La tangente est donc dirigée par l’axe des abscisses.

L’astroïde
- (b)
L’équation de la tangente au point de paramètre est
On a et et donc
(Cycloïde)
Étudier la courbe paramétrée définie par
Solution
L’application est définie et de classe sur .
est l’image de par la translation de vecteur .
est le symétrique de par rapport à l’axe .
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par la symétrie d’axe et par les translations de vecteurs avec .
Tableau des variations simultanées
Le paramètre n’est pas régulier. Cependant
La courbe présente donc une tangente verticale en l’origine.

(Tractrice)
- (a)
Figurer la courbe définie par le paramétrage
avec parcourant .
- (b)
On note le point d’intersection de l’axe avec la tangente au point de paramètre de la courbe ci-dessus. Calculer la distance .
(Lemniscate de Bernoulli)
- (a)
Étudier la courbe paramétrée définie par
- (b)
On introduit les points
Montrer que pour tout point de la courbe ci-dessus
Solution
- (a)
L’application est définie et de classe sur .
et sont confondus.
est le symétrique de par rapport au point .
est le symétrique de par rapport à l’axe
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par la symétrie d’axe et la symétrie de centre .
Tableau des variations simultanées
On pose . On a et .

La lemniscate de Bernoulli
- (b)
On a
donc
(Cardioïde)
Étudier la courbe définie par
Solution
L’application est définie et de classe sur .
et sont confondus.
est le symétrique de par rapport à l’axe .
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par la symétrie d’axe .
Tableau des variations simultanées
Le point de paramètre est stationnaire. Cependant
La courbe présente donc une tangente horizontale en .

- (a)
Étudier la courbe
- (b)
Donner une équation de la tangente et de la normale en le point de paramètre .
- (c)
Déterminer les droites qui sont à la fois tangentes et normales à cette courbe.
Solution
Notons la fonction définissant ce paramétrage.
- (a)
L’application est définie et de classe sur .
Les points désignés par et sont symétriques par rapport à .
Étude limitée à . La courbe obtenue sera complétée par la symétrie d’axeÉtude en . Le point n’est pas régulier, cependant
Il y a une tangente horizontale en
 Figure 1: La courbe
Figure 1: La courbe - (b)
Pour , la tangente en a pour équation
soit
Pour , la normale en a pour équation
soit
Ces équations sont encore valables pour .
- (c)
La tangente est normale à la courbe au point de paramètre si, et seulement si,
ce qui traduit et l’orthogonalité des tangentes en et .
Si alors mais le couple n’est pas solution.
Si alors et puis d’où
ce qui donne .
- (a)
Étudier et représenter la courbe définie par
- (b)
Former une équation de la tangente au point de paramètre .
- (c)
Déterminer un paramétrage du lieu des points d’où l’on peut mener deux tangentes à la courbe précédente orthogonales et figurer cette courbe.
Solution
Notons la fonction définissant ce paramétrage.
- (a)
L’application est définie et de classe sur .
est le symétrique de par rapport à l’axe .
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par la symétrie d’axe .
Tableau des variations simultanéesÉtude en . Le point n’est pas régulier, cependant
Il y a une tangente horizontale
 Figure 1: La courbe
Figure 1: La courbe - (b)
Pour , la tangente en a pour équation:
En : cette équation convient encore.
- (c)
Les tangentes en et de paramètres et et sont orthogonales si, et seulement si,
Si tel est le cas leur intersection est solution du systèmeAprès résolution
Notons la fonction définissant le paramétrage de la courbe ainsi obtenue,
est le symétrique de par rapport à l’axe .
Les points et sont confondus.
On peut limiter l’étude à l’intervalle .Tableau des variations simultanées
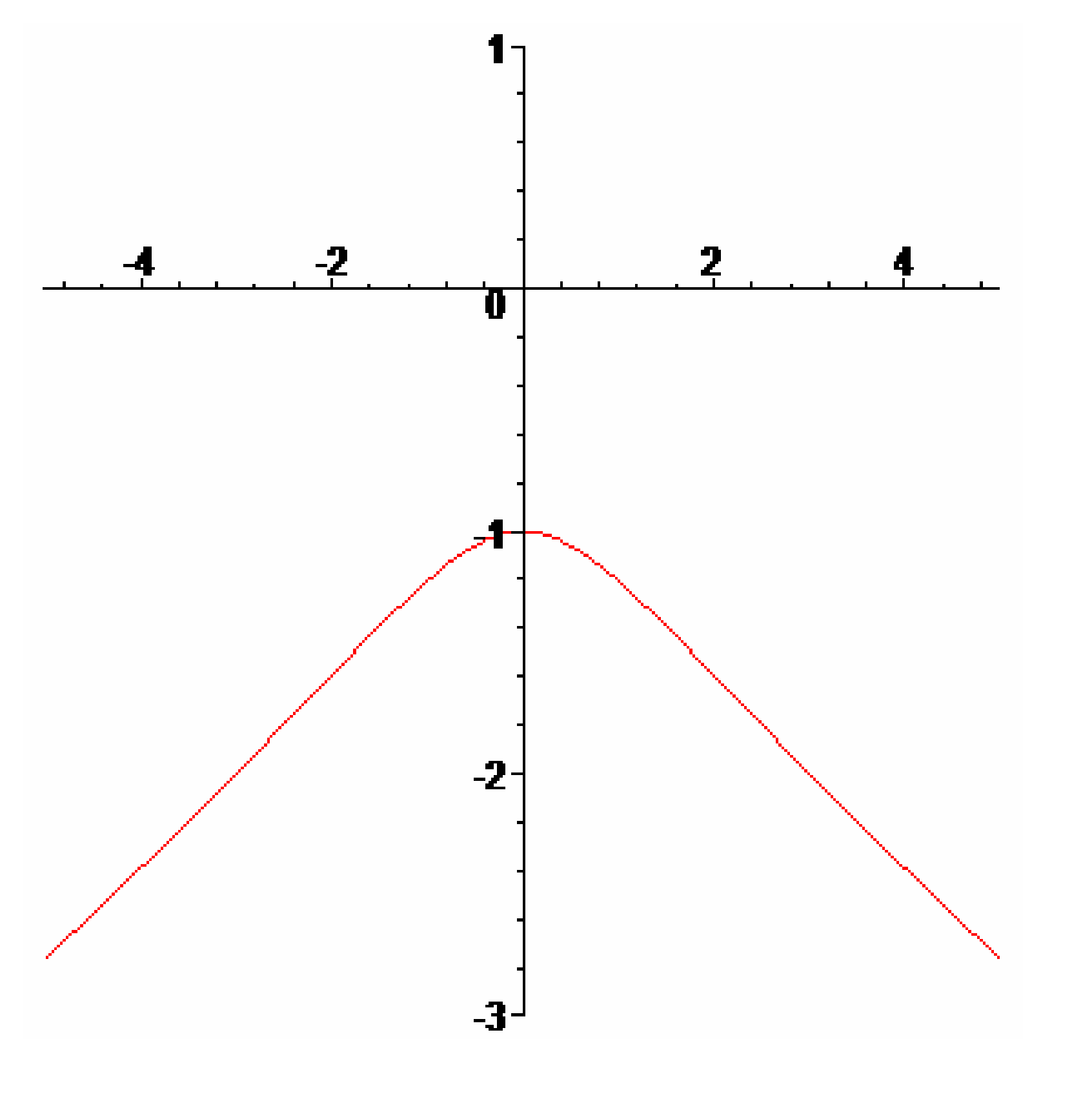 Figure 2: La courbe des points d’où l’on peut mener deux tangentes orthogonales
Figure 2: La courbe des points d’où l’on peut mener deux tangentes orthogonales
Soit définissant un arc régulier tel qu’en tout point de paramètre la tangente soit
Réaliser un paramétrage en coordonnées cartésiennes de l’arc étudié et le représenter.
Solution
Posons avec et fonctions dérivables. Le point de paramètre appartient à la droite et donc
Le vecteur dirige la droite donc
En dérivant et en exploitant , on obtient
donc
L’application correspondante est définie et de classe sur .
est le symétrique de par rapport à l’axe .
On peut limiter l’étude à l’intervalle . La courbe obtenue sera complétée par la symétrie d’axe .
Étude en . Le point n’est pas régulier, cependant
Il y a donc une tangente horizontale en le point de paramètre .
Étude quand
et
La droite est asymptote à la courbe et celle-ci est à gauche de la droite.

Soit le disque de centre et de rayon du plan .
Montrer que les vecteurs tangents à aux points du cercle limite sont orthogonaux au vecteur rayon.
Solution
Soit un point du cercle limite de centre et de rayon .
Soit une application dérivable en 0 avec .
Puisque l’application est à valeurs dans , on a
Or et donc l’application admet un maximum en . Son nombre dérivé y est alors nul ce qui fournit
Ainsi, le vecteur tangent est orthogonal au vecteur rayon .
Édité le 05-04-2024
Bootstrap 3
-
LaTeXML ![[LOGO]](data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAAsAAAAOCAYAAAD5YeaVAAAAAXNSR0IArs4c6QAAAAZiS0dEAP8A/wD/oL2nkwAAAAlwSFlzAAALEwAACxMBAJqcGAAAAAd0SU1FB9wKExQZLWTEaOUAAAAddEVYdENvbW1lbnQAQ3JlYXRlZCB3aXRoIFRoZSBHSU1Q72QlbgAAAdpJREFUKM9tkL+L2nAARz9fPZNCKFapUn8kyI0e4iRHSR1Kb8ng0lJw6FYHFwv2LwhOpcWxTjeUunYqOmqd6hEoRDhtDWdA8ApRYsSUCDHNt5ul13vz4w0vWCgUnnEc975arX6ORqN3VqtVZbfbTQC4uEHANM3jSqXymFI6yWazP2KxWAXAL9zCUa1Wy2tXVxheKA9YNoR8Pt+aTqe4FVVVvz05O6MBhqUIBGk8Hn8HAOVy+T+XLJfLS4ZhTiRJgqIoVBRFIoric47jPnmeB1mW/9rr9ZpSSn3Lsmir1fJZlqWlUonKsvwWwD8ymc/nXwVBeLjf7xEKhdBut9Hr9WgmkyGEkJwsy5eHG5vN5g0AKIoCAEgkEkin0wQAfN9/cXPdheu6P33fBwB4ngcAcByHJpPJl+fn54mD3Gg0NrquXxeLRQAAwzAYj8cwTZPwPH9/sVg8PXweDAauqqr2cDjEer1GJBLBZDJBs9mE4zjwfZ85lAGg2+06hmGgXq+j3+/DsixYlgVN03a9Xu8jgCNCyIegIAgx13Vfd7vdu+FweG8YRkjXdWy329+dTgeSJD3ieZ7RNO0VAXAPwDEAO5VKndi2fWrb9jWl9Esul6PZbDY9Go1OZ7PZ9z/lyuD3OozU2wAAAABJRU5ErkJggg==) -
Powered by MathJax
-
Powered by MathJax ![]()